Turtlebot3
|
Turtlebot3
|
|
|---|---|
 |
|
| Status: Active | |
Superusers
- Ivan Penskiy (ipenskiy@umd.edu)
Overview
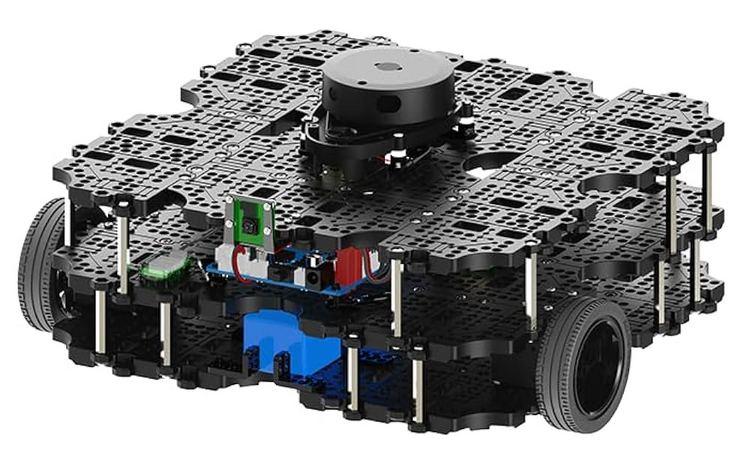
TurtleBot3 is a compact, modular mobile robot platform based on the Robot Operating System (ROS), primarily used in education, research, and prototype development. It features a differential-drive base, OpenCR controller board, a Raspberry Pi single-board computer, a Slamtec RPLIDAR A1 sensor for 360° scanning, and an 8MP Raspberry Pi camera. TurtleBot3 supports core capabilities like SLAM, autonomous navigation, teleoperation, and modular hardware expansion. It was designed to be compact, affordable, fully open-source in both hardware and software, and highly customizable through 3D-printable parts and open CAD data.
The Robotics and Autonomy Lab currently maintains five TurtleBot3 units in the Waffle configuration.
Location
E.A. Fernandez IDEA Factory (Bldg. 228), room 3119.Physical specifications
| Dimensions | 281 x 306 x 141 mm (11.1 x 12.0 x 5.56 in) |
| Weight | 1.8 kg (3.97 lbs) |
| Payload (max) | 30 kg (66.1 lbs) |
| Speed (max) | 0.26 m/s (0.85 ft/s) |
Important documents and useful links
- Turtlebot3 manual
- Quick start guide
- Gazebo simulation
- Github repository
Reservation
Turtlebot3 platform must be reserved before using. The reservation is done using the Google calendar (TBD). Users will be able to reserve the equipment personally after attending the RAL lab orientation and then getting trained on the equipment.
TBD
Video demonstration
The following videos demonstrate capabilities and the some aspects of operating Turtlebot3:Important reminders
- Charge batteries after working with the robot.
- Operate the robots within a clearly marked area to minimize the risk of accidental physical contact with passersbys.
TBD
Shutting down procedures
- Stop ROS communication with the robot.
- Stop ROS nodes launched on the Turtlebot3.
- Turn OFF Turtlebot3 by flipping the switch on the robot.
- Disconnect the battery and put it to charge.
Gaining access to equipment
Contact the lab manager (ipenskiy@umd.edu).